资源介绍
**
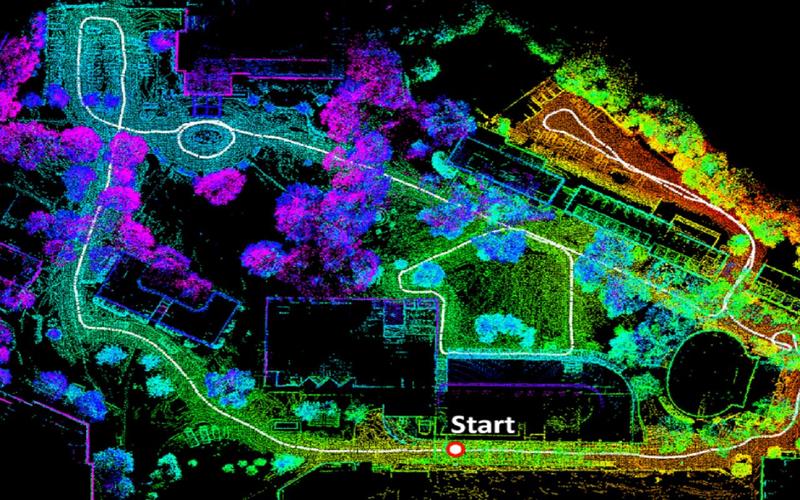
本课程由视觉工坊出品,系统讲解室内外激光SLAM算法的核心原理与实战应用。内容涵盖激光里程计、建图、回环检测、后端优化等关键模块,通过代码逐行解析与项目实践,帮助学员透彻理解激光SLAM从理论到落地的完整流程。适合具备一定ROS与C++基础、希望深入掌握激光SLAM算法并应用于机器人自主导航、三维重建等领域的研发人员、研究生及工程师。课程重点在于剖析算法细节与工程实现技巧,而非泛泛的概念介绍。
**
Related
相关资源
KODA
《魔术教程大合集》
学习资料
HOT 185
《魔术教程大合集》
从入门到精通,揭秘魔术背后的秘密技巧,让你轻松成为舞台焦点!
#魔术教学
#魔术教程大合集
#零基础入门
KODA
【黑马程序员】Go语言与区块链 - 带源码课件
学习资料
HOT 174
【黑马程序员】Go语言与区块链 - 带源码课件
通过本文你将使用Go语言开发自己的区块链(或者说用go语言搭建区块链)、理解哈希函数是如何保持区块链的完整性、掌握如何用Go语言编程创造并添加新的块、实现多个节点通过竞争生成块、通过浏览器来查看整个链、了解所有其他关于区块链的基础知识。
#学习
#知识
#课程
KODA
《高效写作的秘密》(epub)
学习资料
HOT 173
《高效写作的秘密》(epub)
《高效写作的秘密》是美国1500多所高校指定的写作教材,英文版销量超过1000000册,是《纽约时报》写作类畅销书。本书通过45类262个写作模板,揭示了写作的真正窍门,帮助读者掌握如何有效地表达自己的观点,并与他人的观点进行对话。
#写作技巧
#写作方法
#高效写作的秘密
KODA
黑马程序员《SpringAI+DeepSeek大模型应用开发实战教程》
学习资料
HOT 165
黑马程序员《SpringAI+DeepSeek大模型应用开发实战教程》
黑马程序员推出的《Spring AI+DeepSeek大模型应用开发实战》教程是面向Java开发者的大模型应用开发课程,深度整合Spring生态与国产大模型DeepSeek,助力传统Java项目AI化转型。附课件资料。
#AI
#人工智能
#办公效率
评论
资源交流
暂无评论。

